|
<< Click to Display Table of Contents >> Velocity PID |
  
|
|
<< Click to Display Table of Contents >> Velocity PID |
|
Available in Version 17.1 and Newer Updated in 20.1
Application of drive to achieve target belt speed (expressed as a percent of full belt speed) as a function of time. The control scheme can be used for either stopping or starting.
1.Select "Velocity PID" on the motor control pull-down list.
2.The target belt speed data is entered on the control curve data table and displayed on the control curve chart. By default the program will create a control curve that matches your input simulation time. User mode can be selected to manually input a starting curve.
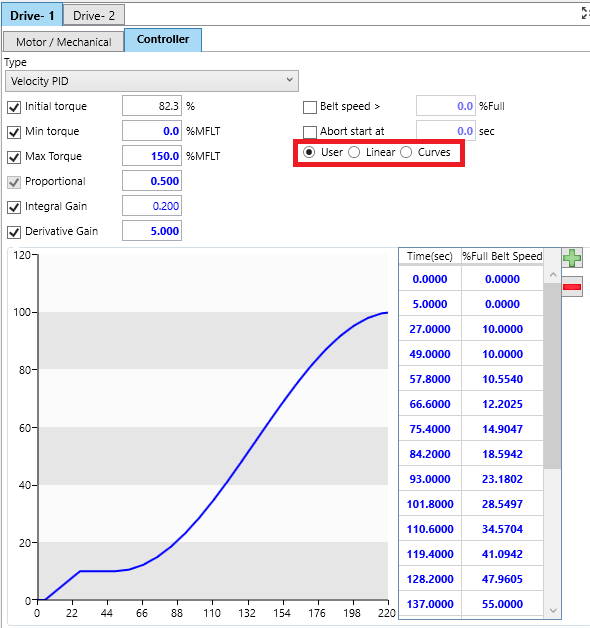
3. A custom curve can be created by selecting one of the three options which will create a smooth line for the graph:
•User: input curve data points directly into the curve data table.
•Linear: input full belt speed and target acceleration time; target curve and table will be automatically calculated.
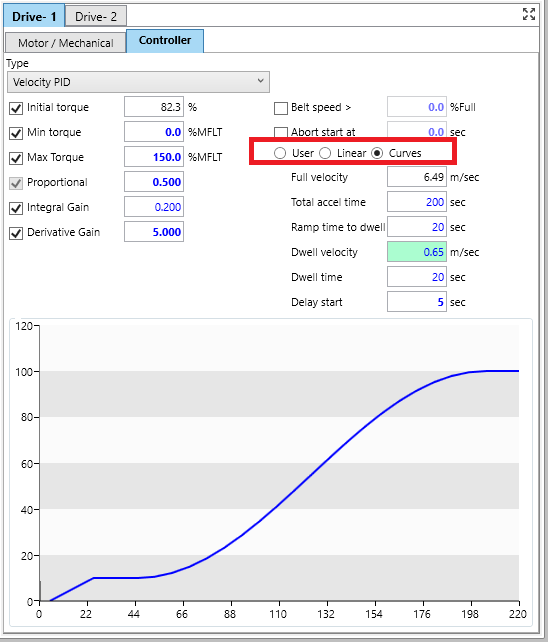
•Curves: for acceleration input full belt speed, target acceleration time, ramp time to dwell, dwell velocity, and dwell time. For deceleration: input full belt speed and target acceleration time. Target curve and table will be automatically calculated.
•For Starting, a "Delay Start" input has been created to give users the ability to delay the controlled start of any velocity curve by the time input into the "Delay Start" input.
4. Control is achieved with a PID (proportional, integral, derivative) controller feedback loop.
•Proportional response is based on difference (error) between the actual belt speed and the target speed.
•Integral response is based on the sum of these errors.
•Derivative response is based on the rate of change of the error.
5. Maximum/minimum applied torque can be limited. Initial torque value can be set to either zero (unchecked) or the running value from BA (checked). When the running torque is selected, it probably will be different for each Belt Analyst™ case.
6. Drive control can be set to run only when the actual belt speed is greater than a target belt speed (target speed is input as percent of full belt speed).
oFor stopping case, drive is initially running and is turned off once target belt speed is achieved. Once drive is off, it stays off regardless of belt speed.
oFor starting case, drive is initially stopped and then turned on once target belt speed is achieved. Once drive is on, it stays on regardless of belt speed.
![]()
7. Control sequence can be aborted at a set time.
![]()