|
<< Click to Display Table of Contents >> Takeup Data |
  
|
|
<< Click to Display Table of Contents >> Takeup Data |
|
Available in v12 and higher
Available in Dynamic Analyst
Updated in v20
The type of takeup is selected in Belt Analyst™. The selection of takeup type and specifications Dynamic Analyst™ should agree with this.
At this time, Dynamics Analyst™ retrieves the takeup operating belt tension, sheaves and pulleys from Belt Analyst™ The user should check to confirm that other takeup data defining starting and stopping is input.
The takeup types utilized in older versions of Belt Analyst are --- "Auto": any type of takeup, such as gravity or active winch, that actively moves the takeup pulley
to maintain the desired belt tension, or "Manual": takeup with a fixed pulley where the takeup tension is manually adjusted.
The takeup type alternatives utilized in Dynamic Analyst™ are:
•Fixed ("Manual in previous program versions) is a takeup with a fixed pulley where the takeup tension is manually adjusted while not running.
•Vertical Gravity: ("auto" in previous program versions) is a type of takeup that actively moves the takeup pulley to maintain the desired belt tension. This is accomplished with a weight connected to the takeup pulley.
•Horizontal Gravity: ("auto" in previous program versions) is a type of takeup that actively moves the takeup pulley to maintain the desired belt tension. This is accomplished with a weight connected to the takeup pulley.
•Electric Winch: if the Low and High Tension set points are the same, the winch will behave as "Always On". If the Low and High set points are different, the winch will behave as "On-Off".
•Hydraulic: cylinder is normally fixed, it adjusts when belt tension is greater than the high tension setting or lower than the low tension setting
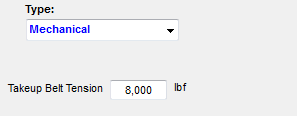
•Custom (Mechanical): takeup is always on tracking the deviation from target belt tension and adjusting actual tension.
Since BA and DA takeup type are input separately, the user must make a selection from pull down list to further define the takeup mechanism.
A brake can be applied to the rope in a gravity takeup, to the winch or to a mechanical takeup to stop the takeup movement; torque is limited by the brake capacity. If a brake is used, the brake force must be entered.
•Running takeup tension cannot be changed from BA value.
•The number of takeup pulleys cannot be changed from BA value.
•If an “auto” response curve is selected, number of sheaves and sheave drag are entered in BA.
•When the Take-up Type is WINCH", "Step 5- Dynamics" properties is available to the User for editing. These properties are only used in the "Dynamic Analyst" module but are shown in Belt Analyst to keep all Winch properties in one place.
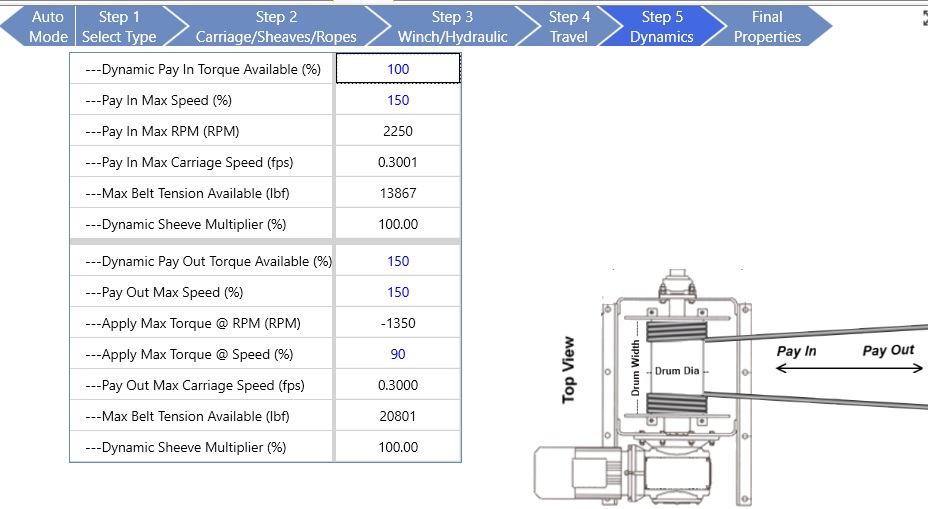
•The "Torque Available" and "Max Speed" for both "Pay In" mode and "Pay Out" mode (winch winding direction) can be changed to reflect winch allowances for limited periods of time (~1-2 minutes) most often during the dynamic conditions of stopping and starting. These maximum speeds might be considered fault limits. RED flags will be raised in Dynamic Analyst if these limits are exceeded.

•The Maximum and Minimum Speed limits and Maximum Torque capabilities are plotted in Dynamic Analyst as a winch performance curve (as Belt Tension vs Carriage Speed).
•The "Electric Winch" take-up type in Belt Analyst was divided as "Always On" or "On-Off". "Always On" means the winch motor is always active (On) maintaining a single set tension point. "On-Off" means the winch is inactive (off) unless the tension measured by a load cell exceeds a minimum or maximum range. Then the winch activates (On) and winds in or out to return the belt tensions within the range. In Version 20 one set of inputs is used. If the Low and High Tension set points are the same, the winch will behave as "Always On". If the Low and High set points are different, the winch will behave as "On-Off".
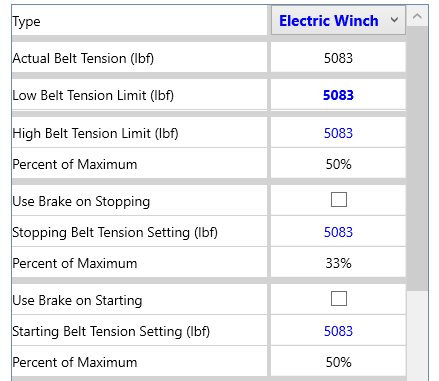
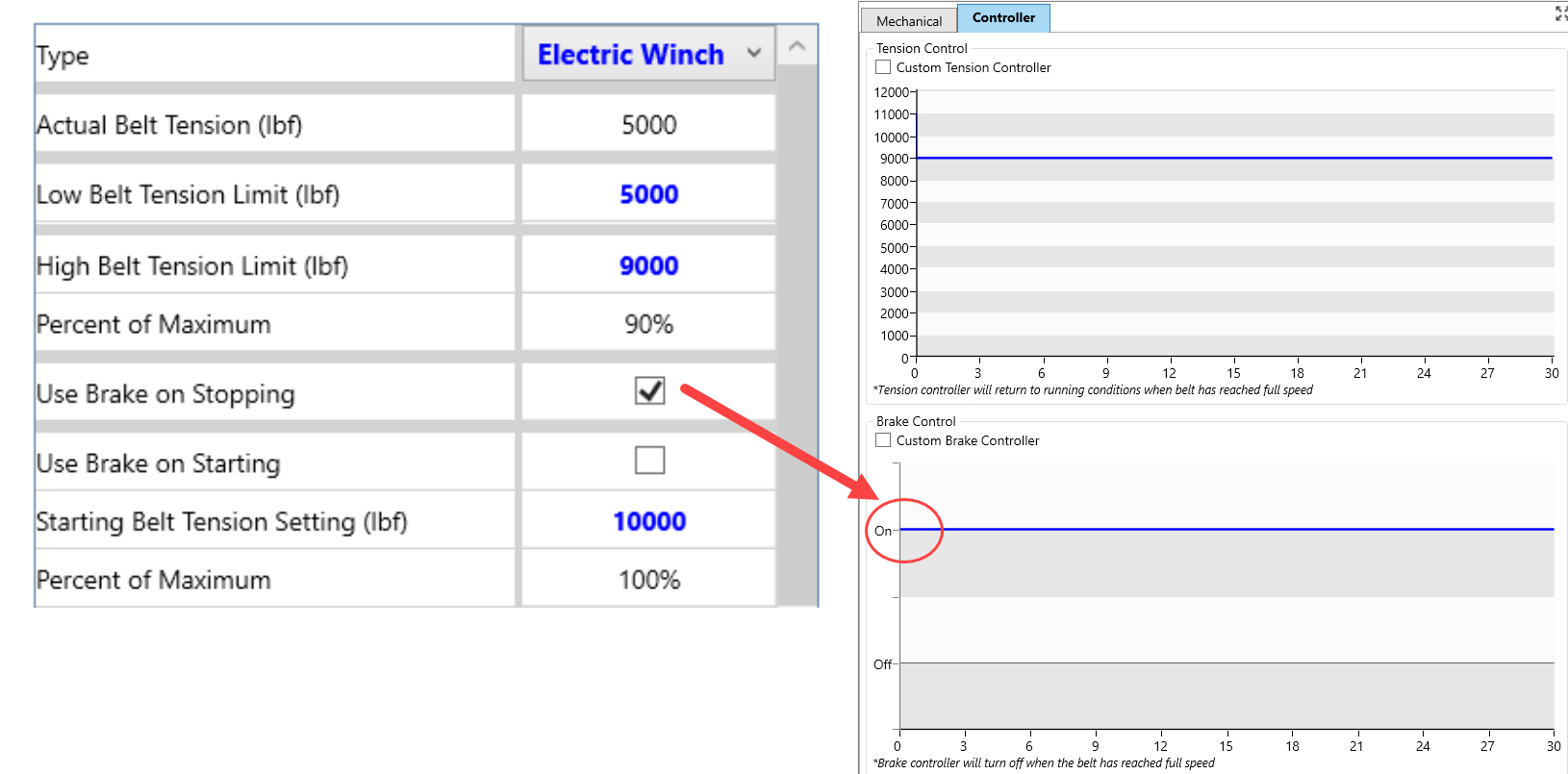
•The winch can also be Active (On) while stopping and starting or inactive (Use Brake box checked). If the box is unchecked (Active) a separate belt tension target can be set for both stopping and starting.
•If either or both boxes for stopping and starting are checked, the appropriate control is reflected in Dynamic Analyst, in the Take-up- Controller folder. These properties can be overridden by the user if more complex custom controls are required.
Example- Stopping with Brake Set:
Example- Stopping with Pre-tension High Set Point:
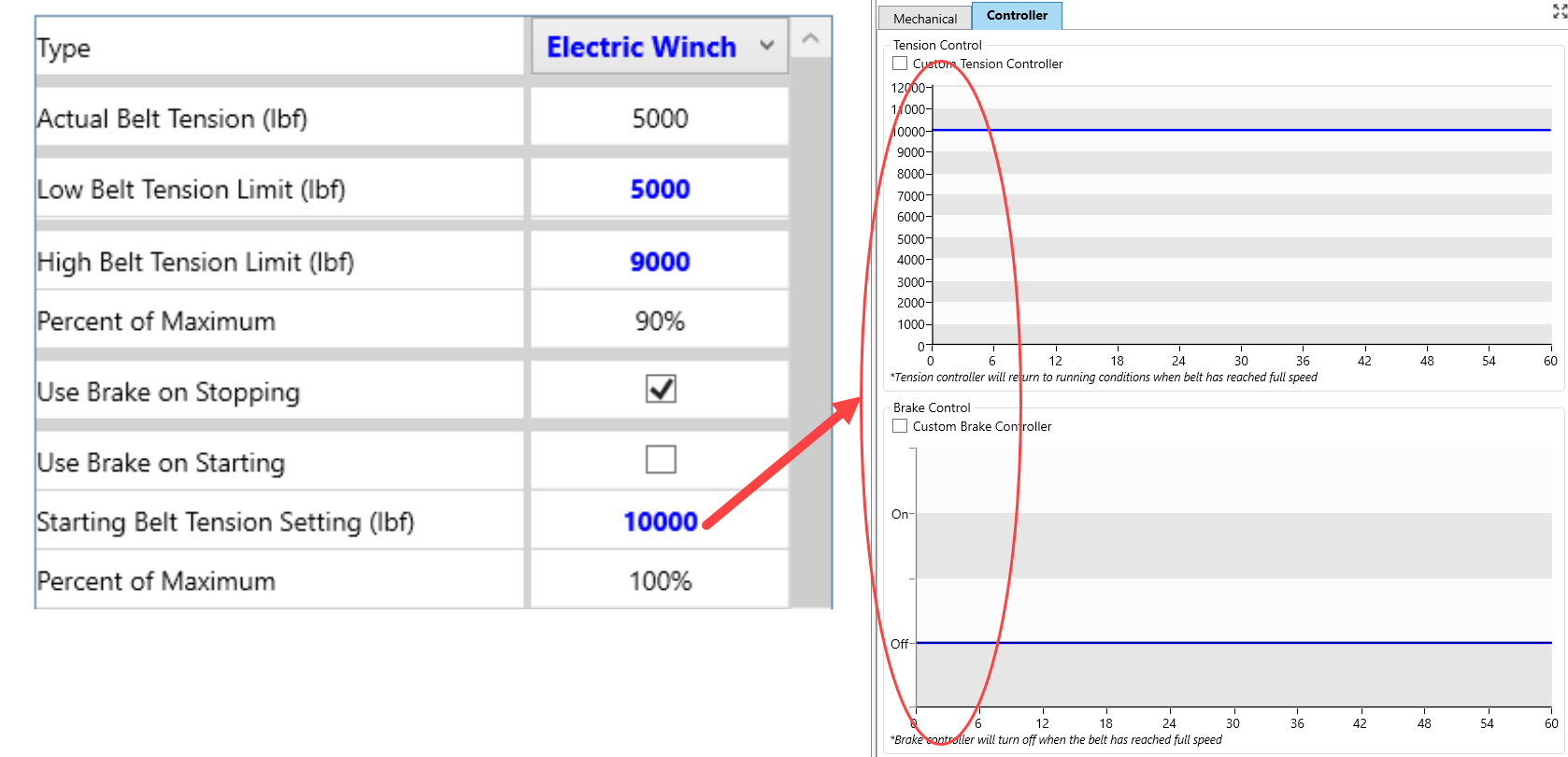
•If a special set point is set for starting, the winch tension will return to the Running Set point number or range when the conveyor reaches its full running speed.
•If different set points are used for stopping and starting or the Brake is set for stopping and the winch is active for starting or any combination of behavior, Dynamic Analyst should be able to accommodate all changes as required by the user.
•Running takeup tension cannot be changed from BA value.
•The number of takeup pulleys cannot be changed from BA value.
•If an “auto” response curve is selected, number of sheaves and sheave drag are entered in BA. Maximum belt tension is entered. The maximum line speed for paying out or pulling in is entered on the form.
•Expected running takeup tension is shown for reference; it cannot be changed from BA value.
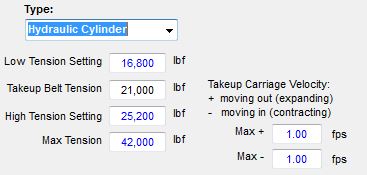
•The number of takeup pulleys cannot be changed from BA value.
•The number of sheaves and sheave drag are entered in BA and cannot be changed in DA.
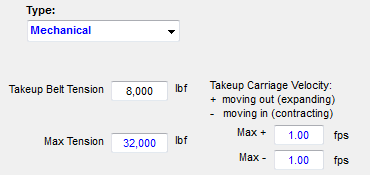
•The high and low tension settings for the dead-band are input. Maximum belt tension is entered.
•The maximum speed for paying out or pulling in is entered on the form.
•The response curve is automatically based on the input data; no user input is allowed.
Takeup pulley cannot move in simulation model.
•Running takeup tension cannot be changed from BA value.
